Robot Agent Built with ROS 2 + MCP + LangChain 1.0
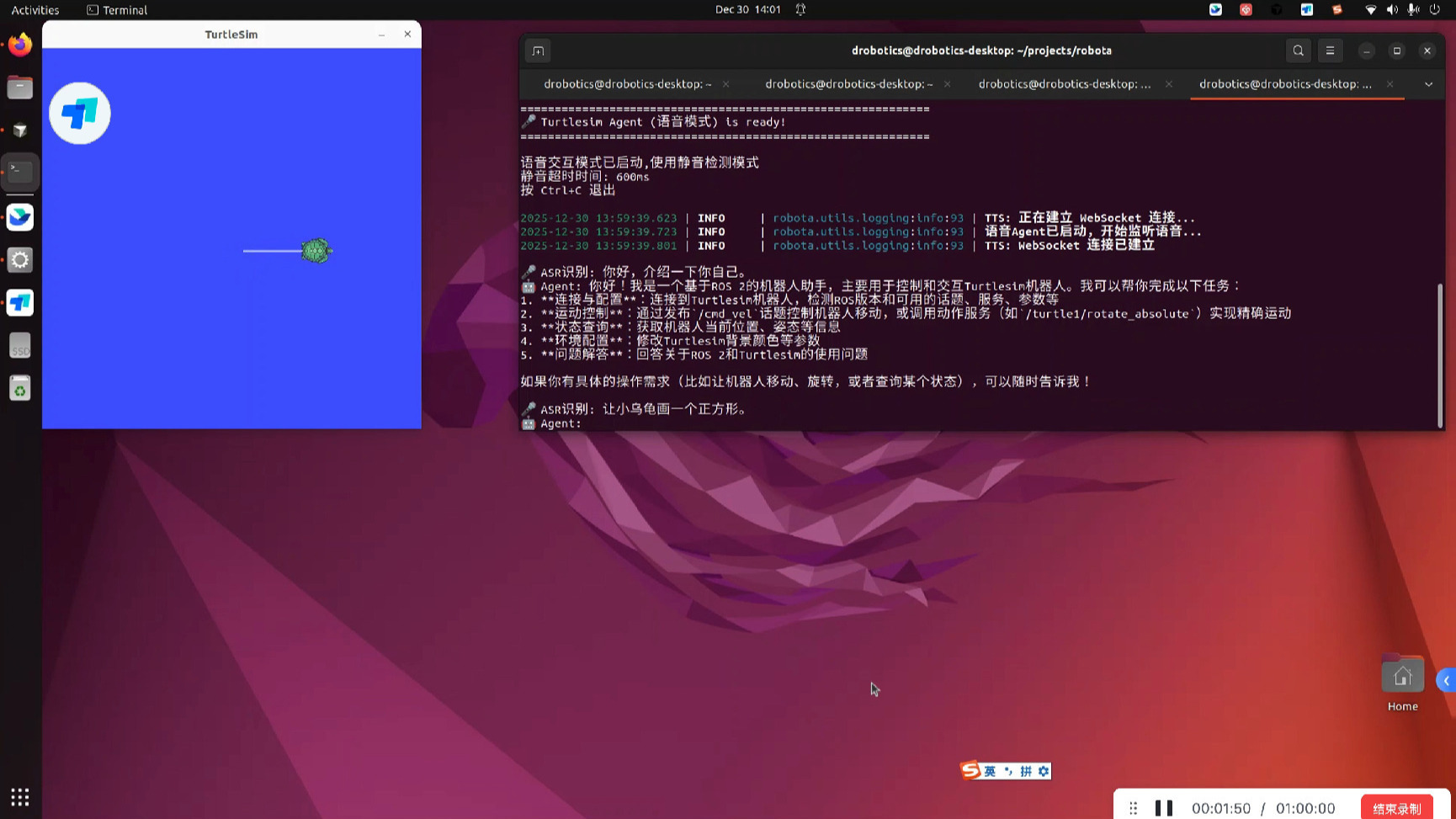
点击图片观看演示视频 | 直接访问
- System: Ubuntu 22.04-desktop
- 环境管理: uv, 版本大于0.9.13
- API KEY: 整个项目需要火山的API KEY,包括ASR,TTS,豆包,如果不清楚如何获取KEY,问火山客服
export ARK_API_KEY=替换成自己的 export ASR_APP_KEY=替换成自己的 export ASR_ACCESS_KEY=替换成自己的 export TTS_APP_KEY=替换成自己的 export TTS_ACCESS_KEY=替换成自己的
参考官方教程
# Set locale
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
# Setup Sources
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl -y
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F\" '{print $4}')
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo ${UBUNTU_CODENAME:-${VERSION_CODENAME}})_all.deb"
sudo dpkg -i /tmp/ros2-apt-source.deb
# Install ROS 2 packages
sudo apt update
sudo apt install ros-humble-desktop
sudo apt install ros-dev-tools
# Environment setup
source /opt/ros/humble/setup.bash
# Install turtlesim
sudo apt update
sudo apt install ros-humble-turtlesim
# Start turtlesim
ros2 run turtlesim turtlesim_node
# Use turtlesim, open a new terminal and source ROS 2 again
ros2 run turtlesim turtle_teleop_key
mkdir -p ~/projects/
cd ~/projects/
git clone https://github.com/robotmcp/ros-mcp-server
cd ~/projects/ros-mcp-server
uv sync
sudo apt-get install portaudio19-dev # 安装portaudio19-dev
cd ~/projects/
git clone https://github.com/FelixFu520/robota.git
cd ~/projects/robota
uv sync
source /opt/ros/humble/setup.bash
ros2 run turtlesim turtlesim_node
source /opt/ros/humble/setup.bash
ros2 launch rosbridge_server rosbridge_websocket_launch.xml
cd ~/projects/ros-mcp-server
uv run server.py --transport streamable-http --host 127.0.0.1 --port 9000
cd ~/projects/robota
uv run tests/agent/04_test_turtlesim_mcp.py